This project aims at researching and investigating how to efficiently employ unmanned aerial vehicles (UAV) ‒ commonly known as drones – to pick up and deliver a package from source to destination entirely autonomously, and as efficiently as possible.
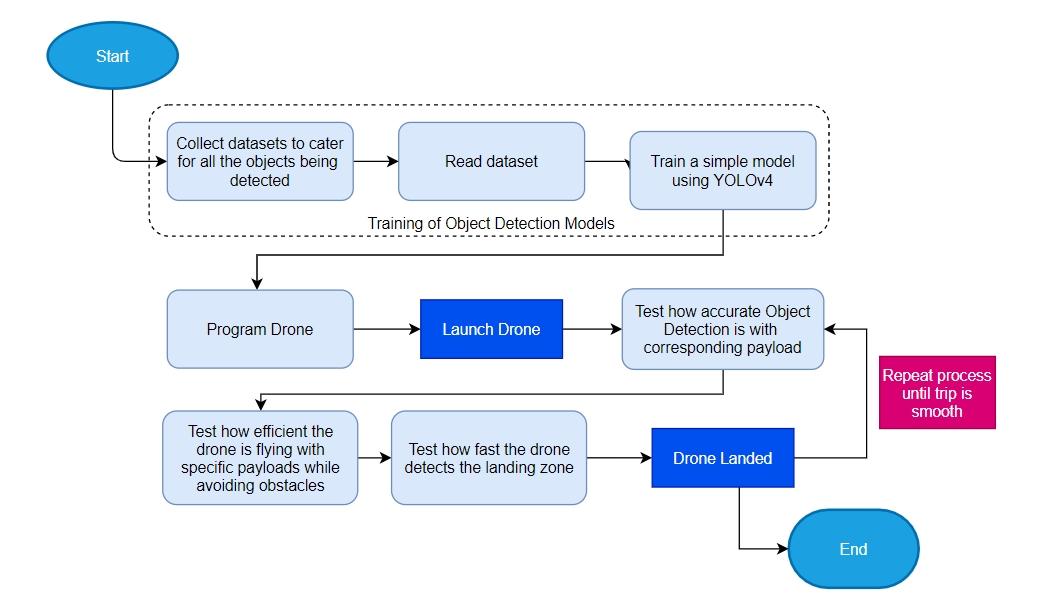
The drone in this project was programmed to carry out its task over a number of distinct stages. Firstly, the drone was to immediately hover one to three metres above the starting point, at which point it would immediately start looking for the designated payload. Once detected, the drone would slowly hover towards it and position itself as close to its centre as it can get. It then picks up the payload through the magnet attached to its small winch. Upon completing this task, the drone slowly hovers back up into the air and starts to pinpoint the landing zone, while constantly keeping track of its environment and surroundings. When the landing zone has been identified, the drone would align itself and begins to make its descent and with that ending its trip.
The experiment made use of a Tello EDU, which is a very small programmable drone measuring just 10cm in length. Given this size, the drone is very light and considerably fast. On the other hand, the main drawback of the device is its battery life, which averages out at approximately 13 minutes.
Being limited to using such a small drone meant that the entire project had to be tailored in such a way as to ensure that no tests would exceed its specified capabilities. A variety of different weights were used for the payload but the drone invariably sought the same object it was trained to detect, using the YOLOv4 algorithm.

References/Bibliography
S. Belkhale, R. Li, G. Kahn, R. McAllister, R. Calandra and S. Levine, “Model-Based Meta-Reinforcement Learning for Flight With Suspended Payloads,” in IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1471-1478, April 2021, doi: 10.1109/LRA.2021.3057046.
P. Nguyen, M. Arsalan, J. Koo, R. Naqvi, N. Truong, and K. Park, “LightDenseYOLO: A Fast and Accurate Marker Tracker for Autonomous UAV Landing by Visible Light Camera Sensor on Drone,” Sensors, vol. 18, no. 6, p. 1703, May 2018.
C. Wang, J. Wang, Y. Shen and X. Zhang, “Autonomous Navigation of UAVs in Large-Scale Complex Environments: A Deep Reinforcement Learning Approach,” in IEEE Transactions on Vehicular Technology, vol. 68, no. 3, pp. 2124-2136, March 2019, doi: 10.1109/TVT.2018.2890773.
Course: B.Sc. IT (Hons.) Artificial Intelligence
Supervisor: Prof. Matthew Montebello