When assisted by obstacle avoidance techniques, an autonomous mobile robot could navigate itself around an unseen space without any human intervention.. Such a robot would interpret information acquired by its sensors to detect obstacles in its way and navigate around them.
This project employed a Lego Mindstorms EV3 kit to build a wheeled differential drive robot, i.e., a mobile robot whose movement is controlled by two separately driven wheels. Since the robot is required to avoid obstacles without bumping into them, the robot was fitted with an ultrasonic and an infrared sensor at its front to measure the distance from any obstacles.
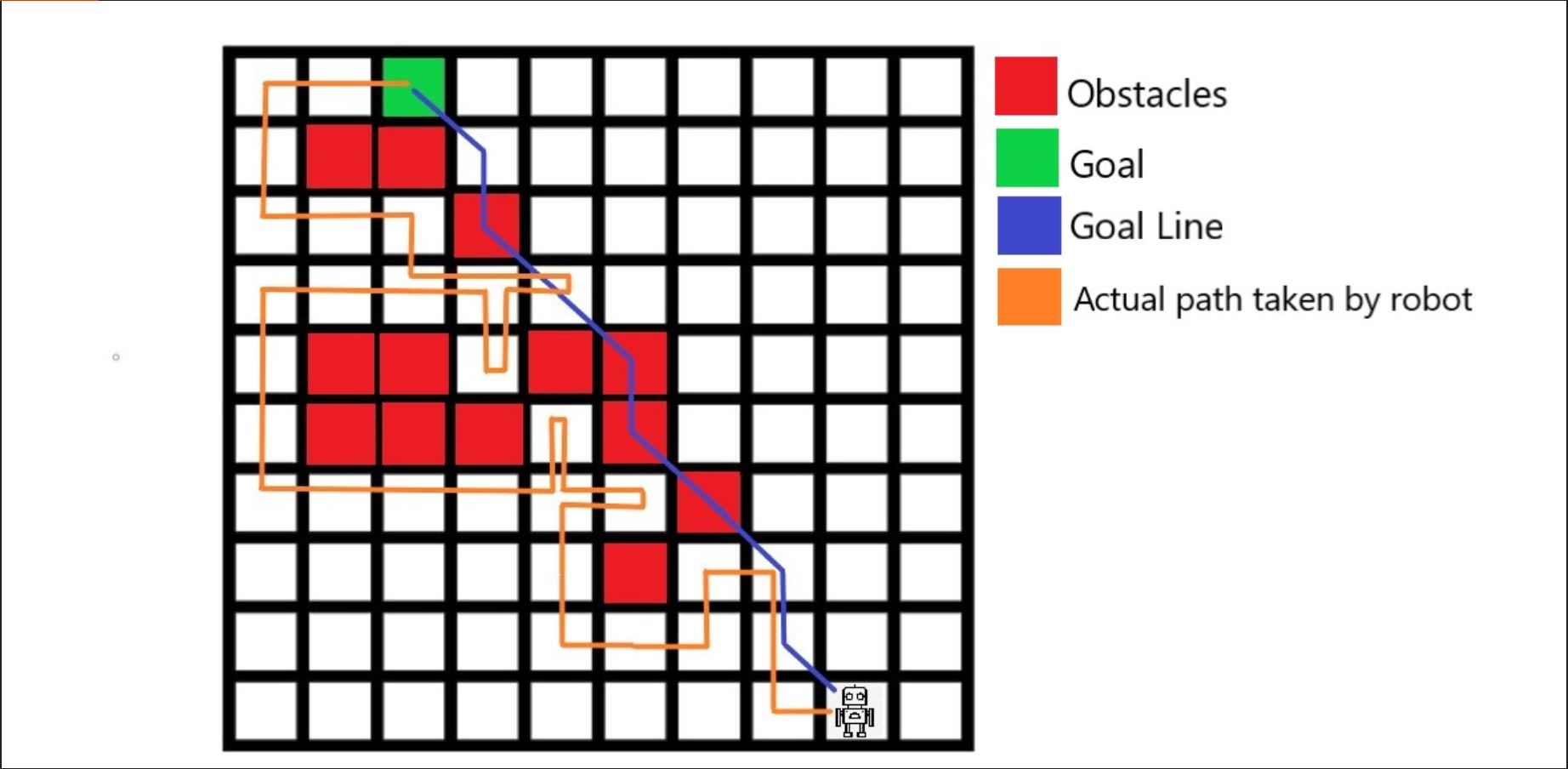
Initially, Bug2 algorithm was investigated for obstacle avoidance. In this case, the robot followed a goal line representing the target path and whenever it encountered an obstacle, it followed the obstacle’s perimeter until it encounters the goal line to follow once again. This process was repeated until the robot reached the desired target location. The vector field histogram (VFH) algorithm was also investigated. This algorithm works over three distinct steps. Firstly, using the robot’s sensors, it constructs a 2D histogram grid which is continuously updated in real time. Secondly, it constructs a 1D polar histogram around the robot’s current location in order to reduce the histogram grid. Finally, candidate valleys are selected and, once the centre of the selected direction would be determined, the robot’s orientation is steered to match it.
The algorithm was tested using a 10×10 grid as the robot’s environment. The grid included a goal location, and different obstacles were randomly placed in the grid in order to deliberately interfere with the path that the robot was planning to take. In each of the ten tests carried out, the robot reached its goal without ever colliding with obstacles.

Course: B.Sc. IT (Hons.) Artificial Intelligence
Supervisor: Dr Ingrid Vella