Recently, there has been an increase in the application of robotics to various areas, one of which is transportation. These include public transport and self-driving cars, which need to follow a predefined path. Path-following is a task that entails robots following a predefined path from a starting position to an end goal.
This project set out to investigate different techniques that could be applied to a robot for following a predefined path. Additionally, the study has considered ways of rendering smooth movement.
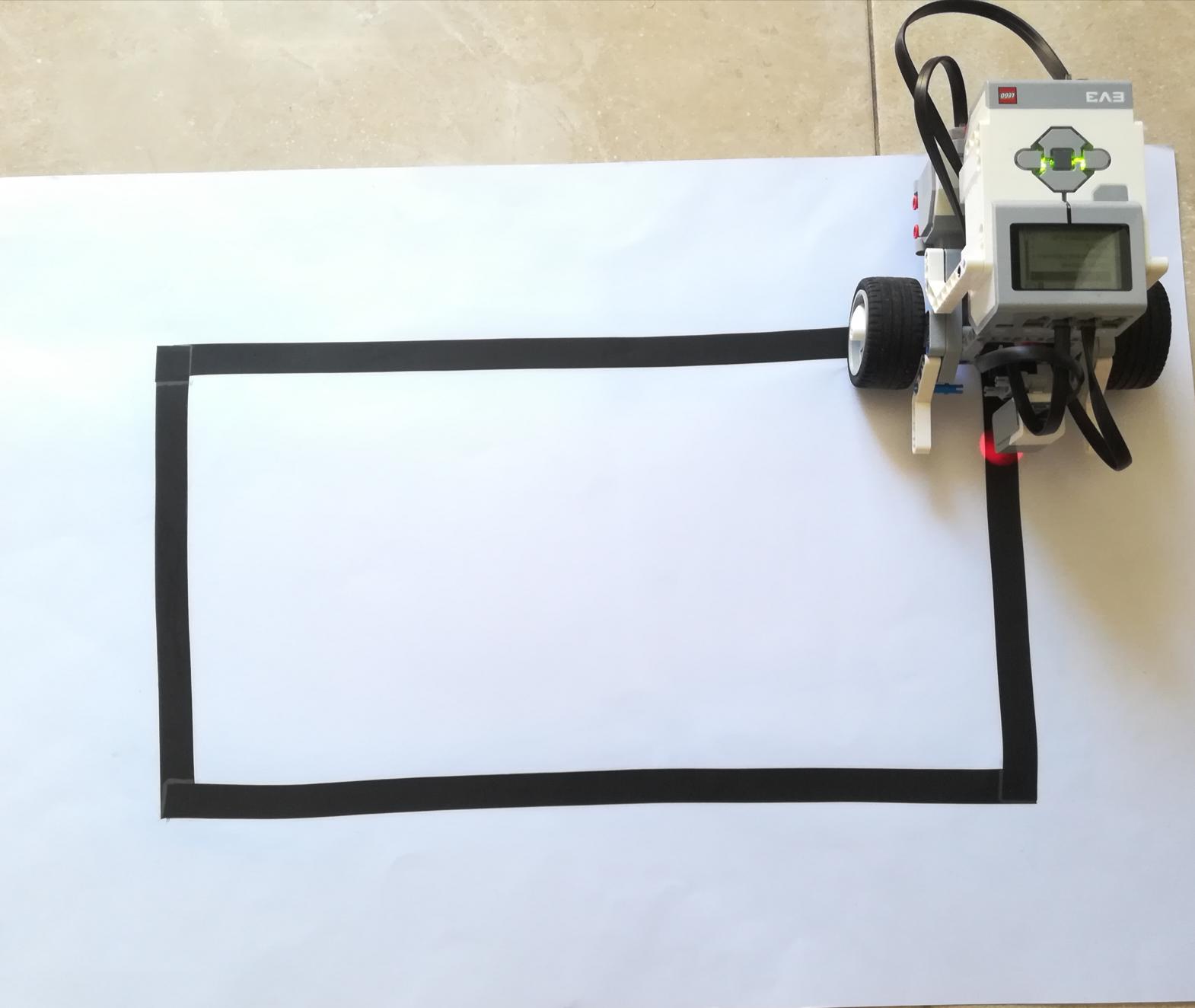
The Lego Mindstorms EV3 Robot Educator was used for the experiment. A colour sensor was attached on the front of the device, aligned at the centre. The environment chosen for the experiment was a black path on a white background for maximum distinction (see Figure 1). The robot could identify whether it was on the black path or the white background, through the colour sensor.
The project considered three algorithms that are commonly used in path-following robots, and compared their performance on four different paths. The first approach used a proportional-integral-derivative controller (PID controller), which is commonly employed in similar projects, as it achieves smooth movement. The second approach applied Q-learning, whereby the robot would attempt to learn from its actions to navigate the predefined path efficiently. Thirdly, the fuzzy logic method was tested; this makes decisions based on a predefined set of rules.
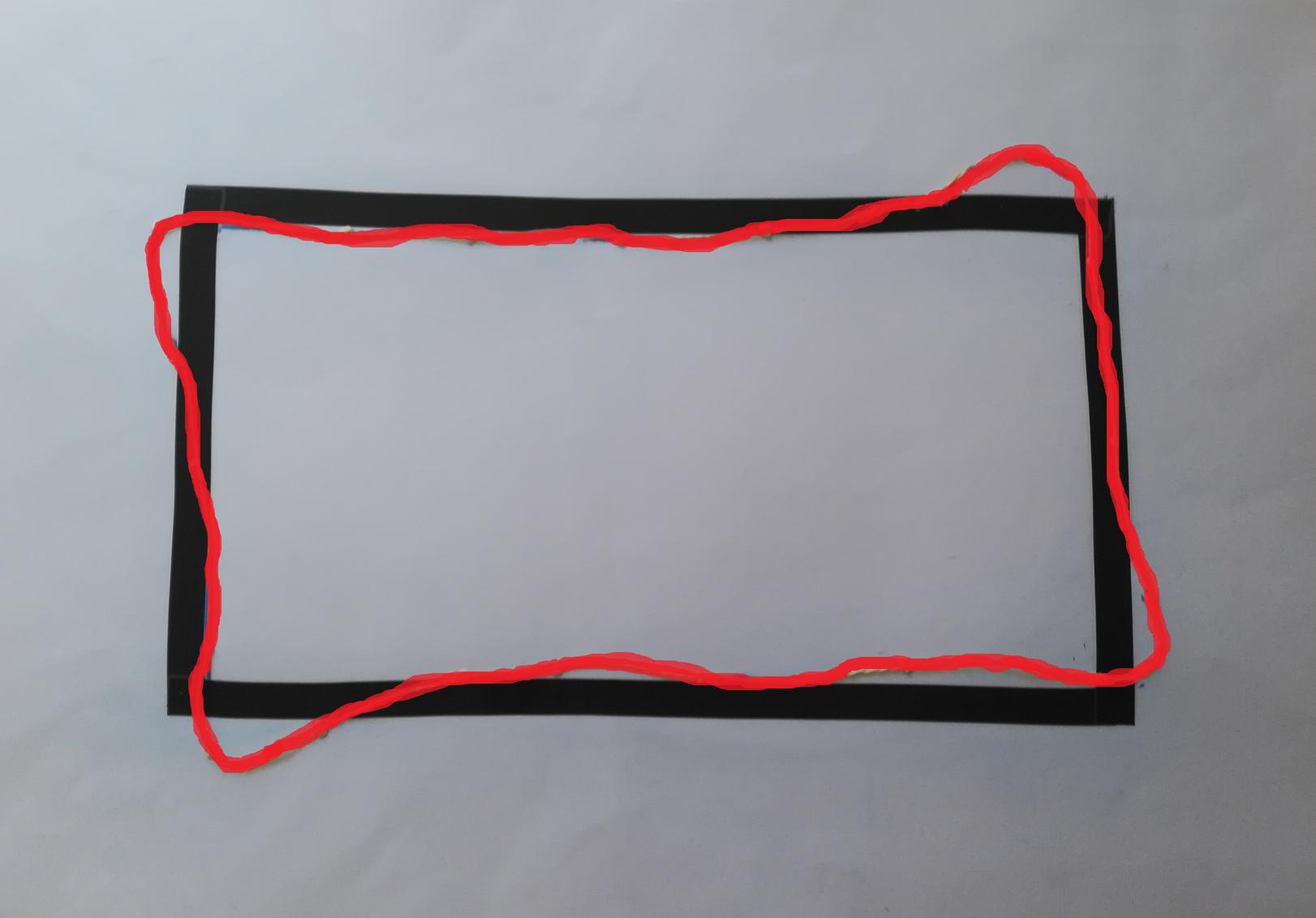
To evaluate the performance of the algorithms, a marker was attached to the front of the colour sensor to trace the path followed by the robot, so as to compute the root-mean-square error (RMSE) between the predefined path and the actual path. Testing the three algorithms on the four different paths showed that all the algorithms achieved a low RMSE, with the PID controller yielding the smoothest movement (see Figure 2).
Course: B.Sc. IT (Hons.) Artificial Intelligence
Supervisor: Dr Ingrid Vella