Over the past few years Unmanned Aerial Vehicles (UAVs) such as drones have evolved and gone through great advances both in miniaturisation of hardware technologies as well as ever- increasing computational power. This being said, present times have also seen a rise in confidence when using robotics and artificial intelligence in emergency situations such as hospital operations and life-risking procedures. All this, in addition to the daily acquisition of aerial imagery, encourages the field of computer vision to take on the challenge of processing UAV live video feed in real-time.
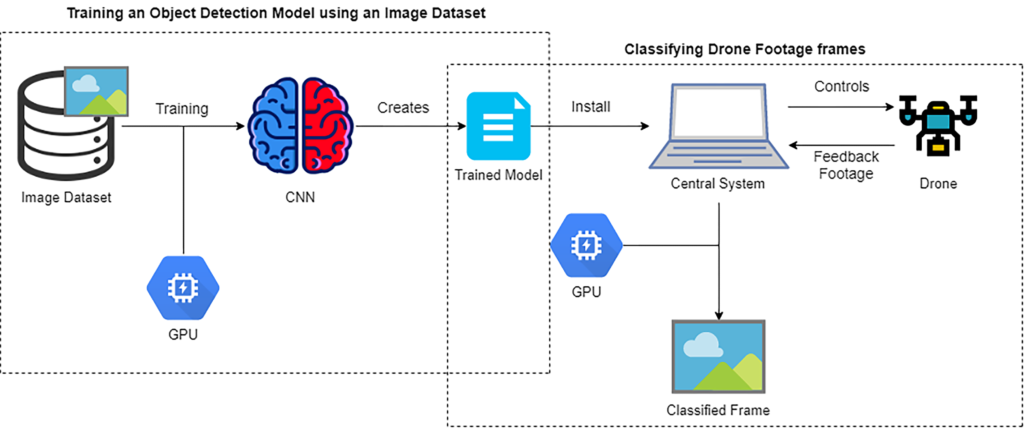
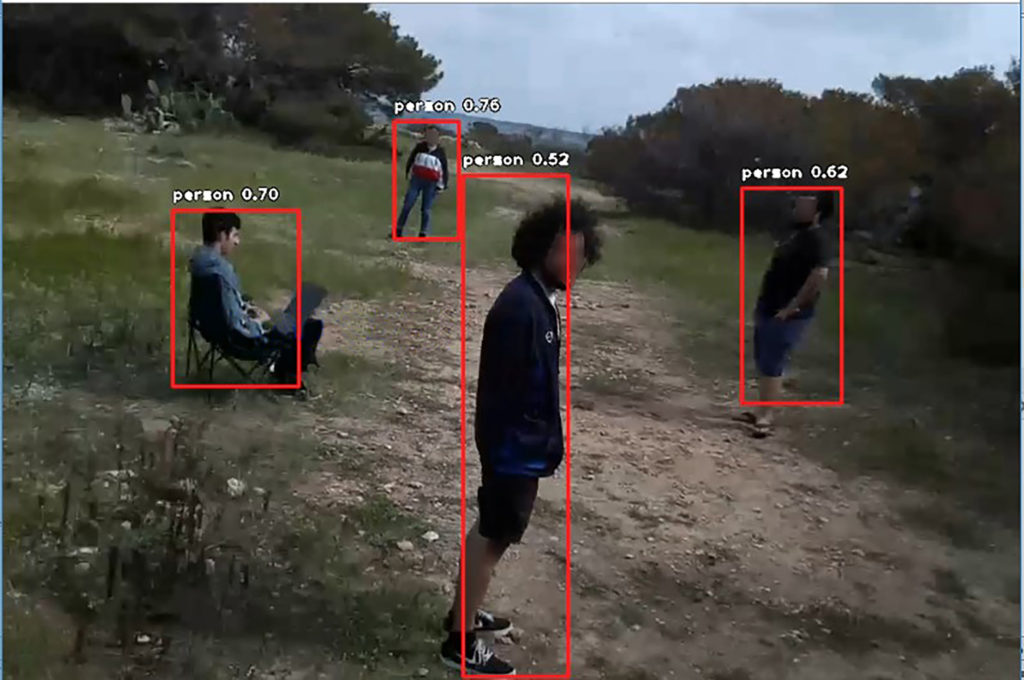
This dissertation evaluates efficient approaches that can be used for a Drone-Based search, primarily focusing on a search and rescue aspect, meaning that the object in search is a person. It starts off with the creation of a custom object detection model and continues with some tests comparing it with other state- of-the-art object detection models that outperform in a certain attributes of importance to real-time object detection such as detection accuracy and processing speed.
The drone in subject is a Tello EDU. Although this drone has a short battery life (around 13 minutes), it offers the possibility of Python coding, which is a necessity in most areas of computer vision. This setup will provide real-time video stream and communicate it directly to a receiving system which processes it and displays it on-screen. Frame processing will be done using several object detection models after they have passed several fundamental tests extracting their capabilities and limits. Footage evaluation will undertake field tests over a set environment, where it will be tested for real-time image processing by recording the average fps. A general evaluation to the result accuracy will then be extracted.
This project also shows how a modular design and implementation can result in easy-to-manipulate code which creates the possibility for branching projects with just a few adjustments, such as an indoor search drone which is be able to search for personal belongings in a home environment while hovering around the rooms.
Student: Daniel Mallia
Supervisor: Prof. Matthew Montebello
Course: B.Sc. IT (Hons.) Artificial Intelligence