Virtual Reality is the technology of immersing an individual in a completely virtual environment to explore and perform tasks. It is the next social platform to interact, play games, all the way to perform simulations, and work. Currently, VR is done through a VR headset, such as the Oculus Quest 2.
Current limitations of VR headsets include the lack of safe navigation and obstacle avoidance since once the user is immersed in the virtual world of VR, he/she is blind to the real world environment. Leading VR industries, currently try to mitigate the risk of injury by having the user
set up a virtual boundary box in an unobstructed playing space. The VR headset then assists the user in remaining within that pre-set playing space. This type of solution does not offer insight about obstacles, neither within the playing space nor outside of it.
Some of the problems with such systems are that they require the user to move any surrounding furniture outside the playing space, and they also can’t track the movements of other third parties that may enter within the boundary playing area, such as humans and animals. This increases the chances of colliding with someone that might pass through the space or even hit objects that are right outside the playing area when the user oversteps. This appears to be a common occurrence as the VR community does not fully trust the boundary box which offers limited to no insight into the surrounding physical environment.
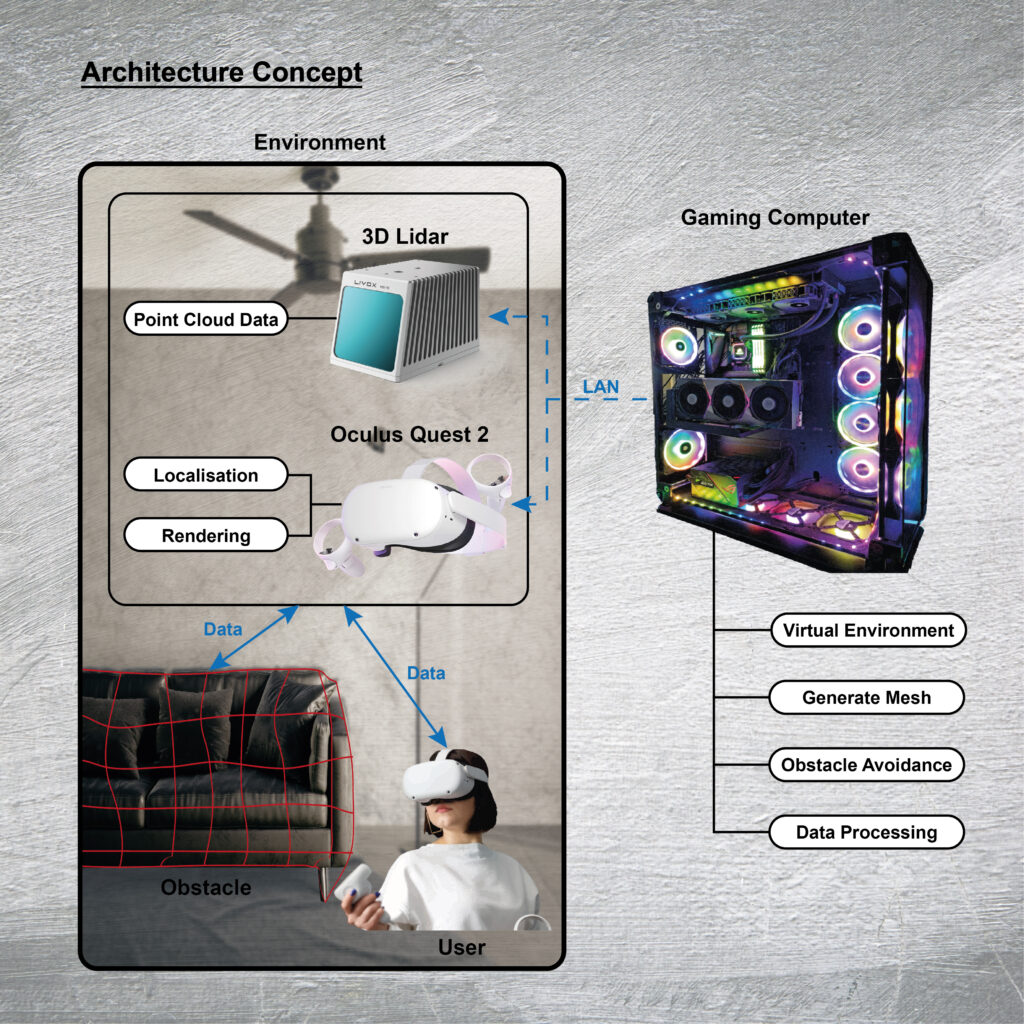
This study looks into current approaches to this problem and attempts a solution based on real time object sensing and visual rendering, in order to improve safety and reduce the risk of injuries while maintaining the sense of immersion. This is done through the use of an external depth sensor, such as a 3D Lidar, mounted along with the VR headset. Similar to a 3D scanner, the 3D lidar would be able to accurately scan 3D objects in real time, compute their distance and then provide a 3D mesh of the object as visual cues onto the headset whenever the wearer is getting too close. This approach should improve the user’s trust and ability to navigate safely across an
environment while avoiding obstacles along the way.
The experimental part of this study will firstly consist of participants trying out the normal boundary box solution provided by Oculus (called Guardian), along with certain experimental features Oculus offers to attempt to navigate and detect any obstacles within the playing area. Afterward, the participant will test the proposed solution using a 3D Lidar, to navigate once again through an environment with obstacles. Lastly, the participants will provide feedback on which
solution they preferred and why. Moreover, factors such as time to complete the task and the number of collisions will be evaluated to determine which solution yielded the best performance.
Student: Andre Desira
Course: B.Sc. IT (Hons.) Software Development
Supervisor: Dr Michel Camilleri