The work developed is a proof-of-concept that aims to address the potential of autonomous drone navigation within the transportation industry. The chosen approach was to carefully consider the key limitations identified by Frachtenberg [1]. A solution that could possibly overcome these limitations for autonomous collection and delivery of objects was conceptualised through careful investigation. In the process, autonomous navigation between two points was also developed as a means of proving that navigation and delivery would be possible without human intervention.
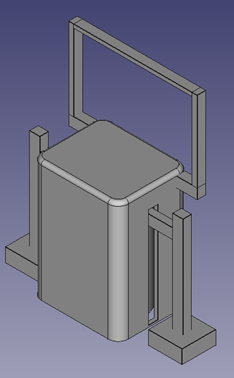
Since it was necessary for the pick-up and drop-off method to be autonomous, the entire process had to exclude human involvement. The apparatus for the pick-up and drop-off experiment was created following an assessment of a number of sources, Kvæstad [2] in particular. The apparatus in question was fitted with a special case to house a magnet, which is a central feature of the apparatus. The case containing the magnet was designed to slide down a rail on launch, bringing the magnet into contact with the item to be transported. Upon landing, side struts would push the magnet upwards, forcing it to disconnect from the object being transported, effectively dropping it off.
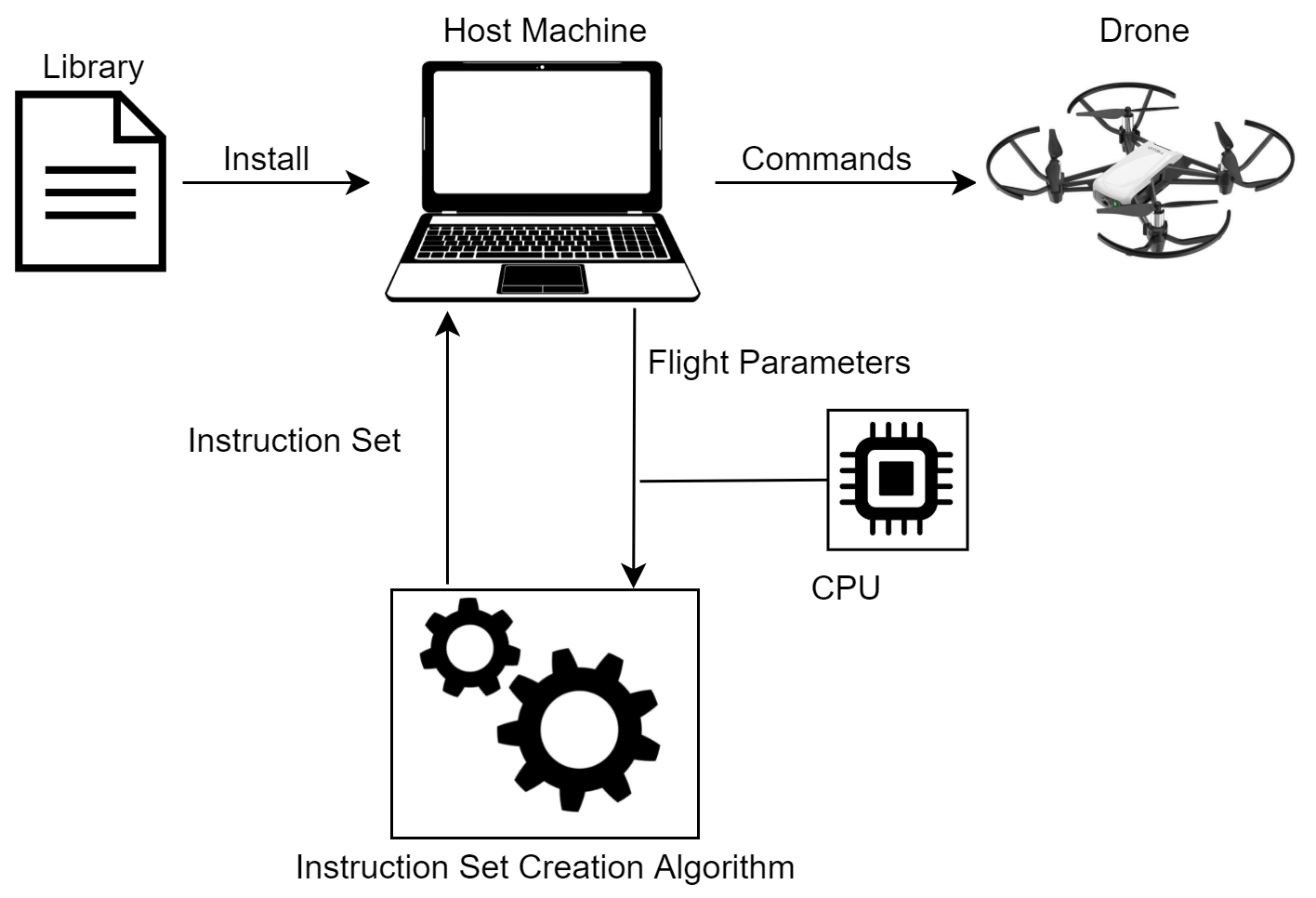
Coupled with the developed apparatus is the transport controller, which has proved to be imperative for user involvement. As stated by Hikida et al. [3], a user interface would help simulate the concept of drone delivery, whilst implementing a means for users to plan routes. Hence, the host machine was provided with start and destination coordinates through the controller, autonomously constructing a list of commands to be followed to complete the delivery.
Since the developed software is a proof-of-concept system on a small scale, the communication between the host machine and drone could only be maintained over a short distance. As a result, any notable limitations could be attributed to the experimental capacity of the work, being a proof-of-concept for autonomous navigation with an object pick-up/drop-off function.
References/Bibliography
[1] Frachtenberg, E., 2019. Practical Drone Delivery. Computer, 52(12), pp.53-57.
[2] Kvæstad, B., 2016. Autonomous Drone with Object Pickup Capabilities (Master’s thesis, NTNU).
[3] Hikida, T., Funabashi, Y. and Tomiyama, H., 2019, November. A Web-Based Routing and Visualization Tool for Drone Delivery. In 2019 Seventh International Symposium on Computing and Networking Workshops (CANDARW) (pp. 264-268). IEEE.
Course: B.Sc. IT (Hons.) Software Development
Supervisor: Prof. Matthew Montebello
Co-supervisor: Dr Conrad Attard