With today’s advancing technology, the number of persons making use of navigation devices has increased significantly. While outdoor navigation systems are already available and in use, this is not the case for indoor navigation. Although past research into indoor navigation has shown some degree of success, further improvements in accuracy and response time would be required to make the technology generally usable. Navigating through large buildings, such as airports and shopping centres, or venues hosting particular events spread over large indoor areas, still present significant challenges.
Many people find navigating such large spaces without any technological aid both confusing and disorienting. Visually impaired persons encounter added difficulty when seeking to navigate unassisted, be it indoors or outdoors. While outdoor spaces tend to be more conducive to developing technology that would be adequately robust and reliable, indoor spaces are very challenging in this respect. This research therefore proposes an artefact in the form of a portable device that would assist a user to determine their current position in an indoor environment, calculate a route to their destination and provide real-time interactive assistance through an unobtrusive wearable device in the form of spectacles.
Previous research studies have utilised various location-sensing techniques to different rates of success. Some studies opted to make use of Bluetooth beacons or radio frequency devices, both of which proved not to reach the level of accuracy required for such navigation [2]. On the other hand, the studies that used Wi-Fi and ultra-wide band achieved a satisfactory level of accuracy [1]. Although the latter provides the highest level of accuracy, it is difficult to implement without a substantial financial outlay. Hence, this study was carried out using , low-latency indoor-location technology, based on wireless Ethernet beacon signals. A low-cost, off-the-shelf ESP32 device with inbuilt Wi-Fi capabilities, was used to create the beacons. These were programmed in object-oriented C++ using the Arduino IDE.
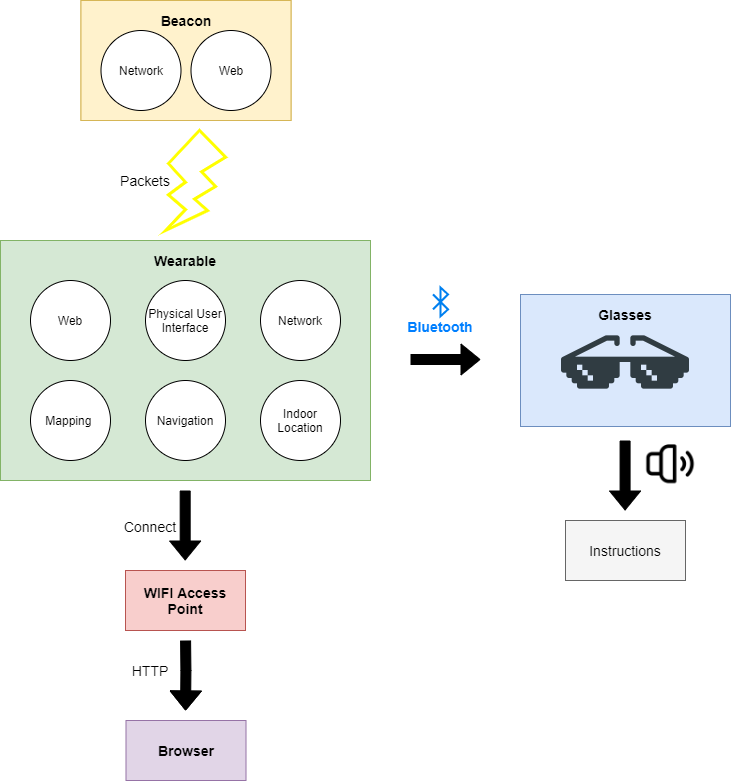
The beacons co-exist with existing Wi-Fi access points and provide fast updates of the user’s position, which is crucial in helping the user avoid dangerous situations. A map of the building in grid form could be managed through a web-based interface. Important environment locations such as doors, stairs, lifts and obstacles were marked and colour-coded. The beacons should be distributed throughout the building, preferably in the corners of each room, to obtain the best possible coverage and level of accuracy. The microcontroller found on the portable device would receive packets with information regarding the position of the beacons before calculating the route based on mapping points.
The accompanying schematic diagram outlines the technologies used. The location has been calculated according to the distance of the user from the beacons in the area by making use of the received signal strength indicator (RSSI). A limit was set to ignore beacons having a low signal strength, so as to keep the level of accuracy as high as possible. In this study, indoor navigation and obstacle avoidance was computed through the combination of position and map data. Directional vibrations and voice prompts were then used to guide the user to the final destination.
References/Bibliography
[1] B. Ozdenizci, K. Ok, V. Coskun and M. N. Aydin, “Development of an Indoor Navigation System Using NFC Technology,” 2011 Fourth International Conference on Information and Computing, 2011, pp. 11-14, doi: 10.1109/ICIC.2011.53.
[2] M. Ji, J. Kim, J. Jeon and Y. Cho, “Analysis of positioning accuracy corresponding to the number of BLE beacons in indoor positioning system,” 2015 17th International Conference on Advanced Communication Technology (ICACT), 2015, pp. 92-95, doi: 10.1109/ICACT.2015.7224764.
Course: B.Sc. IT (Hons.) Software Development
Supervisor: Dr Peter Albert Xuereb
Co-supervisor: Dr Michel Camilleri