An indoor positioning system is a technology used to locate a person or an object within a building or in an environment in which conventional GPS technology is not reliable due to signal impairments. Such systems have been successfully deployed in commercial settings such as retail shops, factories, and airports. This work aims to set up and analyse the characteristics of a simple indoor positioning system using inexpensive digital radio modules operating on the 2.4GHz band, with particular interest in its feasibility as a navigational tool for indoor vehicles, such as smart wheelchairs.
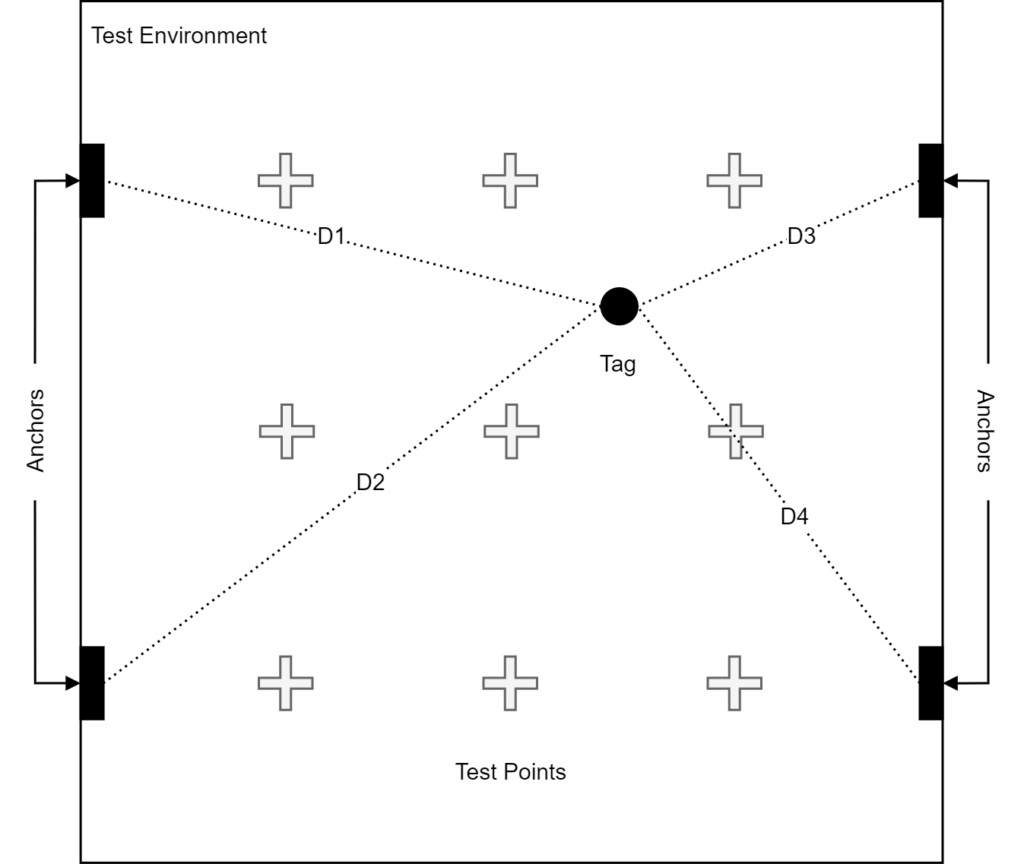
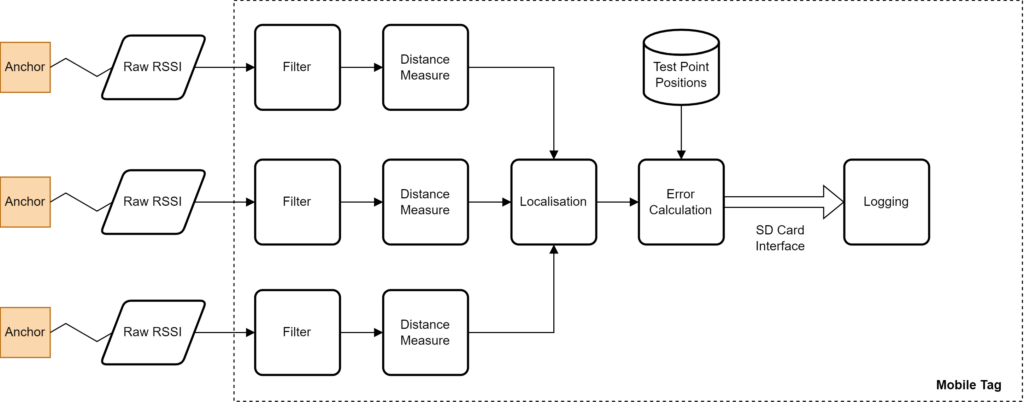
To test the system, a number of ‘anchors’ or ‘beacons’ are installed around the perimeter of a test environment. A receiving ‘tag’ is then placed on several markers around the room whose precise location is pre-determined using a laser measuring device. As in typical indoor positioning systems, the receiving end exploits some characteristic of the signal which varies according to the distance between the transmitter and the receiver – in this case, the RSSI or the Received Signal Strength Indication. Using a signal propagation model, the RSSI from the closest three beacons can be translated into Euclidian distance, and thus the position is triangulated.
The receiver module is connected to a single-board computer which performs the necessary computation and logs the results to an SD card. This data is then analysed and visualised on a personal computer.
The key performance metric is the positioning error, i.e., the difference between the actual position and the position calculated by the system. Since the raw RSSI readings are highly prone to fluctuations, filtering and smoothing techniques are applied to improve the accuracy. To assess the robustness of the system, variables such as the number of beacons and the amount of clutter in the room are also considered.
Student: Connor Attard
Course: B.Sc. IT (Hons.) Software Development
Supervisor: Dr Michel Camilleri