Transportation of people and objects in indoor areas requires several costly resources. Different environments such as a warehouse, workplace, or hospital, have similar requirements and face similar problems. In specific, individuals using a wheelchair who require another person’s help to move from point A to point B seek facilitation to make their lives easier. Smart wheelchairs could have the potential to provide a solution to some of their needs. A smart wheelchair is an upgrade to a powered wheelchair and a normal wheelchair as it merges the use of artificial intelligence and mobile robotics with the present Power Wheelchair technology.
By adding an extra level of intelligence, smart wheelchairs may overcome many of a normal wheelchair’s limitations by performing autonomous movement with minimal user intervention. Moreover, on another level, the wheelchair may be made capable of navigating a building autonomously and safely by exploiting various sensor technologies and computer-based logic. A variety of prototypes have been developed by several global research institutions. Although these mobility systems are still being developed and tested, they have only recently been introduced to the commercial world due to their high costs.
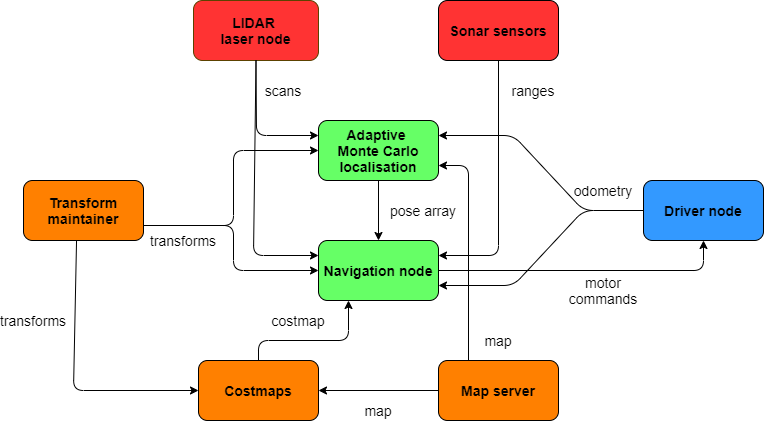
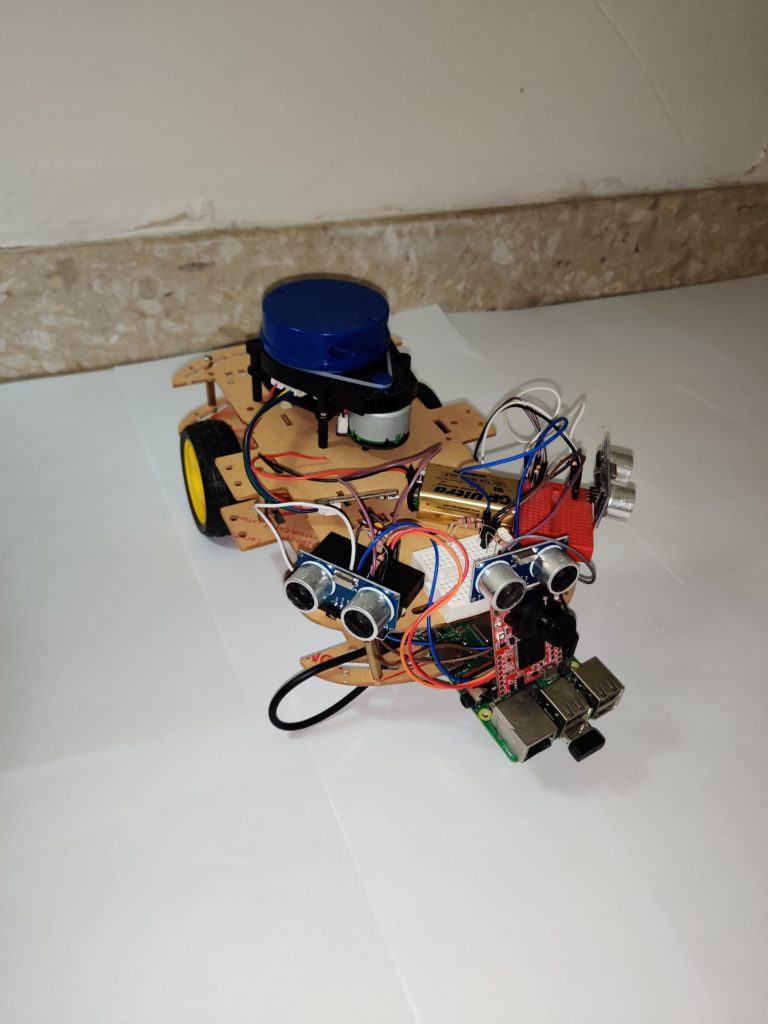
The aim of this study is to replicate a smart wheelchair through a robotic prototype with the use of the low cost and readily available hardware, and to measure its effectiveness robustness and safety for the intended task in an objective and methodical manner. The prototype was installed with a motor driver and several sensor components. A software infrastructure was built on top of the Robot Operating System to connect the components installed on the robotic vehicle, control them through a single integrated system, and take measurements. Two different navigational modes — semi-autonomous and autonomous algorithms — were designed and implemented onto the robot. The core functionality of this system focused on navigation and location of the prototype, as well as decision making depending on the scenarios – including obstacle avoidance. Given the constraints, due to the robot’s small size, an environment was built to emulate typical scenarios and used for experimentation to obtain the required performance data. The outcome points to the possibility of replicating this study on a smart wheelchair in real scale, with the aim of reducing costs significantly whilst still addressing safety requirements and ultimately enhancing wheelchair users’ independence.
Student: Dejan Mijailovic
Course: B.Sc. IT (Hons.) Software Development
Supervisor: Dr. Michel Camilleri
Co-supervisor: Dr. Peter Albert Xuereb